Основные способы контроля собственных частот рабочих лопаток при выполнении вибрационного контроля или модальных испытаний можно условно разделить на две группы:
- По физическому принципу измерения сигнала отклика лопатки
- По способу интерпретации результатов
По физическому способу получения данных можно разделить на две основные группы:
- Контактные способы
- Измерение с применением датчиков вибрации (акселерометры, проксиметры, велосиметры)
- Измерение с применением резонаторов (емкостных камертонов)
- Бесконтактные способы
- Лазерный
- Акустический
- Вихретоковый
Контактные способы всегда ориентированы на контроль отклика лопатки на возмущение непосредственно с пера лопатки, либо с технологической оснастки, в которой лопатка закреплена. Если в случае контроля с применением датчиков вибрации сигнал передается в средства обработки и представления данных, то в случае применения емкостных камертонов сигнал подается на контуры язычков емкостных камертонов, каждый язычок которого встроен в цепь с определенной собственной частотой, что при совпадении основной частоты сигнала и частоты контура камертона приводит к механическим колебаниям последнего. В настоящее время метод с применением камертонов используется крайне редко, если полностью не вышел из применения.
Рисунок – Пример емкостного камертона
При использовании бесконтактных методов измерения основным различием является только первичный преобразователь (датчик) вибрации. В случае с лазерным датчиком контроль вибрации осуществляется с помощью измерения изменения расстояния контролируемой точкой на поверхности пера лопатки во времени. При применении вихретокового метода контроля контролируется изменение величины воздушного зазора между датчиком и поверхностью пера лопатки. При применении акустического метода контролируется спектральный состав звука отклика рабочей лопатки по средствам направленного измерительного микрофона.

Рисунок – Примеры первичных преобразователей бесконтактного типа
Каждый из обозначенных методов имеет свои преимущества и недостатки. Для удобства некоторые из аспектов сведены в таблицу ниже:
| Тип преобразователя | Достоинства | Недостатки |
| Лазерный | · Высокая точность
· Простота установки · Хорошая чувствительность |
· Требования к отражающей способности поверхности
· Сложность контроля зеркальных поверхностей · Требования к освещенности помещения |
| Акустический | · Простота применения | · Повышенные требования к шумоизоляции помещения
· Чувствительность к сторонним источникам звука |
| Вихретоковый | · Высокая точность
· Хорошая чувствительность |
· Сложность установки зазора в пределах линейной характеристики датчика
· Чувствительность к внешним воздействиям |
Впоследствии, полученные результаты измерений подвергаются последующему ручному, автоматизированному или автоматическому анализу, с целью выделения из полного спектра, частот соответствующих собственным частотам колебаний рабочих лопаток.
Основными способами интерпретации являются:
- Анализ форм колебаний
- Амплитудно-частотный резонансный
- Спектральный
- Графический (фигуры Лиссажу)
Анализ форм колебаний является методом основанным на фиксации узловых точек колебаний на поверхности пера путем оценки точек с переменой фазы колебаний с фиксированной частотой вынуждающей силы. В данном случае корректнее является называть данный вид модальными испытаниями, т.е. испытаниями нацеленными на выявление форм колебаний и соответствующих им частотам. Впоследствии полученные точки на поверхности объединяются в узловые линии и сопоставляются с аналитическими решениями для определения вида и тона фиксируемой формы колебаний.
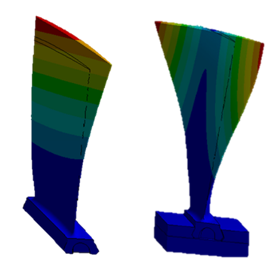
Рисунок – Поля деформаций пера лопатки при колебаниях с различными собственными формами
Амплитудно-частотный метод основан на измерении величины отклика точки поверхности пера лопатки на разных частотах вынуждающей силы с целью поиска локальных частотных максимумов соответствующих точкам резонанса на одной из собственных частот лопатки.
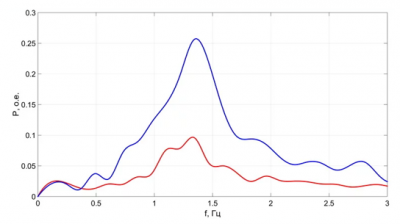
Рисунок – Пример АЧХ отклика при возмущении вынуждающей силой с разными частотами
Спектральный метод основан на анализе максимальных уровней отклика лопатки в контролируемой точке в выбранной полосе частот. При этом диапазоны частот выбираются предварительно на основании численного анализа собственных форм и частот колебаний. Данный метод является одним из наиболее подходящих для выполнения типового производственного вибрационного контроля рабочих лопаток.
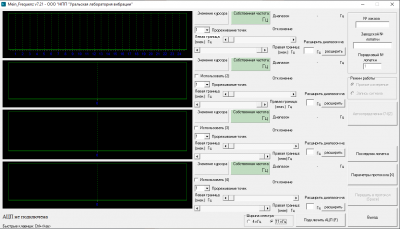
Рисунок – Пример спектрального представления оклика при ударном возбуждении колебаний лопатки
Анализ фигур Лиссажу основан на анализе картин, полученных в результате сложения двух сигналов одинаковой или кратных частот ориентированных перпендикулярно друг к другу. Для данного вида анализа применяются отфильтрованный в полосе входной сигнал, измеряемый с поверхности пера лопатки, и опорный сигнал с регулируемой частотой (например, от генератора сигналов синусоидальной формы). В результате сложения двух сигналов на экране осциллографа образуются так называемые фигуры Лиссажу форма которых зависит от кратности соотношения частот входного и опорного сигналов и их фазового сдвига. Для случая когда данное соотношение составляет 1:1 или близкое значение к единице, то форма принимает вид окружности либо эллипса.

Рисунок – Примеры фигур Лиссажу на экране осциллографа
Также данный метод отлично подходит для осуществления поиска узловых линий форм колебаний лопаток.
Конкретное применение различных методов должно опираться на том, какие задачи ставятся в рамках выполнения работ, однако с точки зрения типового контроля наиболее оптимальным и наименее трудозатратным, на сегодняшний день, является спектральный метод анализа отклика лопатки на случайное возмущение (ударный имульс).
Автоматизированный спектральный метод анализа успешно применен в рамках реализованного ООО «НПП «Уральская лаборатория вибрации» программно-аппаратного комплекса для контроля собственных частот колебаний рабочих лопаток на базе программного обеспечения Mein Frequenz.